- Semiconductor Technology Now
Motorization, Act II — The Age of Automated Driving
Report Series
Part 3
Technologies that Support Automated Driving
- November 2, 2015

An automated driving system must perform extremely complex and subtle process control, which only becomes possible with the most sophisticated information and communications technology (ICT) and machine technology attainable. Driving conditions change constantly depending on the time of the day, weather, location, and so forth. Unexpected situations can occur at any time, too. For example, a careless pedestrian might suddenly dash in front of an approaching car to cross the street. An automated driving system must be able to respond to myriads of scenarios instantly and correctly. Compared to autopilot systems that are widely used on aircraft, an automated driving system has to be more sophisticated by orders of magnitude. The automobile industry is putting all leading-edge technologies at its disposal-including sensor, object recognition, 3D modeling, and artificial intelligence (AI) technologies-into developing automated driving systems, with steady and solid progress. Part 3 of the series focuses on the latest trend of technologies that will make automated driving systems possible, as well as on the efforts of the companies developing pertinent technologies.
An automated driving system largely consists of four functional elements (Figure 1): namely, 1) data collection using sensors and wireless devices, 2) analysis and recognition for identifying the car's location and objects in the surroundings, 3) behavioral decision for determining how the car should maneuver, and 4) system control for ensuring precise operation of the engine, steering wheel, etc.
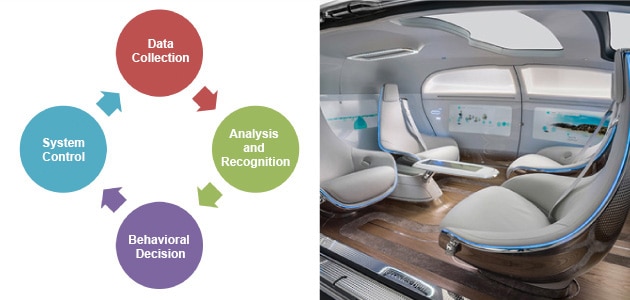 |
To attain these functions, diverse technologies must be used in combination, including electronics such as sensors and processors, wireless communication technology for exchanging information with roadside infrastructures and nearby cars, information processing technology such as image recognition and AI, and mechanical control technology.
System control technology nearly perfected
Of the four above-mentioned functional elements of an automated driving system, system control technology has already matured enough to reach perfection. For a long time after the automobile was invented, there had been physical connections between the control devices (such as accelerator and brake pedals, steering wheel, and shift lever) and the components subject to control (i.e., engine, brakes, tires, and transmission gears). In recent years, however, these mechanical linkages have been increasingly replaced by electronic ones, enabling the so-called drive-by-wire system.
Switching from mechanical to electronic control systems often reduces the vehicle weight dramatically, improving fuel efficiency and driving performance. It also improves driving comfort, safety, and reliability because additional controls can be introduced to monitor and enhance the vehicle's performance, which is not possible with mechanically controlled systems operated directly by a driver. For this reason, many vehicle control components have shifted from mechanical to electronic ones, including the accelerator, gear shift, brakes, and steering, so much so that nowadays automobiles are often referred to as "computers on wheels." In fact, recent cars have more than 50 electronic control units (ECUs) per vehicle, and many of those onboard microcomputers are integrated with drive-by-wire systems.
Now that the drive-by-wire technology for such basic automotive functions as running, turning, and stopping has been in place, we have the makings of an advanced driver-assistance system (ADAS) or an automated driving system. The next technological challenge will naturally be in the areas of data collection, analysis and recognition, and behavioral decision-making. Let us examine each of these areas more closely to find out what progress is being made.
Using diverse sensors most effectively
The data collection process roughly consists of three elements. These include sensor technology, wireless communication, and detailed map-making.
A self-driving car is equipped with diverse sensors, each having different characteristics that best serve its purposes (Figure 2). Data from different sensors are integrated and assessed comprehensively in a process known as sensor fusion, giving accurate information about the car's surroundings. The following table shows the respective advantages and disadvantages of sensors on the Google Car, a level 4 self-driving test vehicle being developed by the tech company.
| Stereo camera | Single lens camera | Laser | Millimeter wave | |
|---|---|---|---|---|
| 100 m detection range | ✓✓ | NA | ✓✓✓ | ✓✓✓ |
| Viewing angle | ✓✓✓ | ✓✓✓ | ✓ | ✓ |
| Range accuracy | ✓✓ | NA | ✓✓✓ | ✓✓✓ |
| Sideways range accuracy | ✓✓✓ | ✓✓ | ✓ | ✓ |
| White line detection | ✓✓✓ | ✓✓ | NA | NA |
| Rain and snow | ✓✓ | ✓✓ | ✓✓ | ✓✓✓ |
| Fog | ✓ | ✓ | ✓ | ✓✓✓ |
| Nighttime | ✓✓ | ✓✓ | ✓✓✓ | ✓✓✓ |
| Object dependency | ✓✓ | ✓✓ | ✓ | ✓ |
| Interference | ✓✓✓ | ✓✓✓ | ✓ | ✓ |
| Safety | ✓✓✓ | ✓✓✓ | ✓ | ✓✓ |
| Cost | ✓ | ✓✓✓ | ✓✓ | ✓ |
The Google Car is equipped with five types of sensors, of which two are most effective in grasping the vehicle's surroundings. One is a laser-based ranging device called lidar (Figure 3). Lidar emits infrared laser to sweep its vicinity, measuring the time it takes for the light to hit an object and be reflected back, thereby accurately measuring the distance to an object as well as its relative speed. Google claims its lidar can scan the car's surroundings within a radius of 182 meters in less than 0.1 second. The data obtained by lidar are overlaid on map data and used to determine the location of the car as well as that of other cars and obstacles.
 |
Another useful sensing device is a millimeter wave radar. While infrared-dependent lidar performs poorly in foul weather, a millimeter wave radar functions well regardless of weather conditions, and although its resolution is somewhat inferior, it has a superior range of 250 meters. Both devices work fine in the dark.
Contents
Cross Talk
Visiting Laboratories
Expert Interview
Topics
Report Series
- Motorization, Act II – The Age of Automated Driving

- How Society Will Change in the Digital Age
- Part 1
- What is Digitalization?

- Sports Technology Protecting Athletes and Providing Fairer Refereeing